 Barras
Barras
 Miçangas e esferas
Miçangas e esferas
 Parafusos e porcas
Parafusos e porcas
 Cadinhos
Cadinhos
 Discos
Discos
 Fibras e tecidos
Fibras e tecidos
 Filmes
Filmes
 Flocos
Flocos
 Espumas
Espumas
 Folha de alumínio
Folha de alumínio
 Grânulos
Grânulos
 Favos de mel
Favos de mel
 Tinta
Tinta
 Laminado
Laminado
 Nódulos
Nódulos
 Malhas
Malhas
 Filme metalizado
Filme metalizado
 Placa
Placa
 Pós
Pós
 Vara
Vara
 Folhas
Folhas
 Cristais individuais
Cristais individuais
 Alvo de pulverização
Alvo de pulverização
 Tubos
Tubos
 Lavadora
Lavadora
 Fios
Fios
 Conversores e calculadoras
Conversores e calculadoras
 Escreva para nós
Escreva para nós
Projetos anteriores - Protótipo de robô móvel
Neste artigo, quero falar sobre meu precioso projeto - um Protótipo de Robô Móvel que eu e uma equipe de outros estudantes de engenharia projetamos para minha aula de ENED (Educação em Engenharia). As especificações do projeto exigiam um Protótipo de Robô Móvel (PMR) que pudesse pegar uma carga de um determinado material, identificar esse material com base no peso e, em seguida, entregar esse material à sua estação de descarte específica em uma instalação. Só nos pediram para enviar um protótipo de papel para a aula, pois construir um era logisticamente impossível devido à pandemia da COVID-19. Mesmo com apenas o protótipo de papel, no entanto, nossa equipe ainda tinha que pensar sobre os materiais que estávamos usando e os efeitos que esses materiais teriam na construção final.
Em nossa aula de engenharia, fomos instruídos a usar um software de renderização específico chamado BrickLinks para criar imagens de como seria o protótipo físico do robô. O BrickLinks é um software que permite aos usuários criar coisas com peças de LEGO e, portanto, o protótipo que criamos, se construído, seria feito com peças de LEGO. Todos os tijolos e peças LEGO são feitos de um tipo de plástico muito durável chamado acrilonitrila butadieno estireno ou (ABS).1 O fato de o robô ser feito de um plástico durável era importante, pois ele tinha de ser leve o suficiente para que o motor em sua parte traseira pudesse alimentá-lo com eficiência, mas também tinha de ser durável o suficiente para conter os contêineres de materiais para que pudesse identificá-los por peso. Além disso, as pernas do PMR tinham de ser projetadas tendo em mente os obstáculos, e não eram permitidos pneus. Por isso, nossa equipe decidiu usar uma peça de borracha LEGO feita do mesmo material dos pneus LEGO, mas sem o eixo no meio. A LEGO usa um produto de borracha muito semelhante à borracha usada nos pneus reais,2 que é uma combinação de borracha de butadieno, borracha de estireno e borracha natural.3 Fizemos os pés do PMR especificamente com um material de borracha, para que eles ajudassem o protótipo a ser mais estável em terrenos irregulares e em terrenos difíceis ou acidentados. Os pés também estavam em pivôs que permitiam que eles balançassem para frente e para trás, permitindo que o robô mantivesse uma postura firme em circunstâncias irregulares.
Para explicar melhor o projeto: o PMR seguiria uma linha pintada no chão de um armazém, sabendo quando virar à direita ou à esquerda com os sensores de luz em ambos os lados (a decisão de tornar a mobilidade do PMR baseada em uma linha pintada no chão não foi nossa, mas uma estipulação que nos foi dada). O cérebro do robô está alojado no console LEGO montado em sua parte traseira, que também serve como motor para as seis pernas. A parte frontal contém um sistema de polias que ajudou o robô a pegar as caixas de material. A aparência real do PMR foi inspirada nas aranhas e na maneira como suas pernas funcionam, pois tivemos que basear nosso projeto na maneira de andar de um animal, de acordo com as diretrizes da aula.
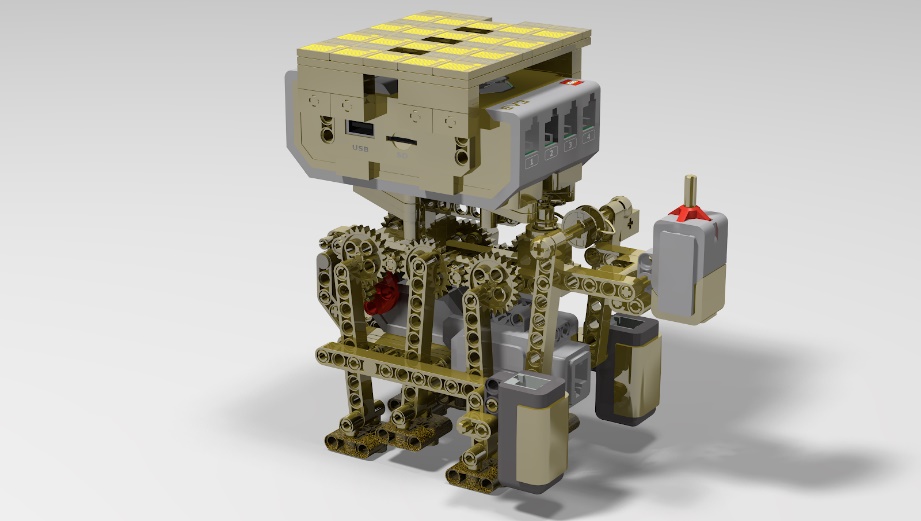
O anexo acima mostra a renderização final do robô no software BrickLinks. Como a imagem ilustra, o robô tinha de ser feito de um material que fosse resistente o suficiente para suportar não apenas o servo e o motor na parte superior do robô, mas também os dois sensores de luz na parte frontal inferior. O material do PMR também precisava ser flexível o suficiente para sustentar o sistema de polias na frente, que deveria ter a capacidade de se tornar totalmente vertical e horizontal para pegar as caixas de material, medir seu peso e levá-las ao seu destino. Felizmente, o plástico comum da LEGO cobre todos os aspectos de que precisamos, de modo que o robô não precisou ser construído com peças especiais ou peças impressas em 3D, exceto os pés. O plástico é ótimo para o chassi e a polia do PMR, mas é muito rígido e nada flexível ou elástico. Isso significa que os pés feitos de plástico LEGO não seriam bons em qualquer tipo de terreno irregular ou difícil, o que era uma necessidade para o nosso projeto. Por isso, a equipe decidiu recorrer a um material avançado que tivesse mais elasticidade. Por fim, decidimos usar as dimensões de uma versão pequena da peça usada nas pernas do robô, mas feita de borracha de pneu LEGO. Essa peça teria de ser feita sob medida, mas é relativamente pequena e são necessárias apenas 6 peças. As peças dos pés seriam então colocadas em um eixo giratório de quase 90 graus, para que o robô pudesse ajustar sua aderência ao passar por pisos irregulares ou obstáculos.
No final, os materiais avançados usados para esse projeto foram uma mistura de borracha sintética e natural e plástico ABS. O plástico contribuiu para a rigidez do corpo do robô e, ao mesmo tempo, permitiu que ele mantivesse um nível de flexibilidade para seu sistema de transporte. A borracha foi usada para aumentar a tração do robô e para dar a ele a capacidade de andar em terrenos difíceis com eficiência.
Bibliografia:
- Pickering, David (1999). The Ultimate LEGO Book (O Livro Definitivo da LEGO). Nova York: Dorling Kindersley. ISBN 0-7894-4691-X.
- Threewitt, C. (2020, 11 de setembro). Você nunca vai adivinhar qual é a empresa que fabrica o maior número de pneus do mundo. https://entertainment.howstuffworks.com/lego-tires.htm.
- S. Associação de Fabricantes de Pneus. (2020). O que há em um pneu. What's In a Tire | USTMA . https://www.ustires.org/whats-tire-0#:~:text=The%20two%20main%20synthetic%20rubber,in%20combination%20with%20natural%20rubber.
Observação: o artigo foi enviado para a Stanford Advanced Materials College Scholarship 2021.
Juan Ignacio Alvarado
Bolsa de estudos da Stanford Advanced Materials
Universidade de Cincinnati


 Chin Trento
Chin Trento


